
Erste Konzepte
Im Juli begann die Planung der Diplomarbeit. Die ersten Konzepte für Zentriermechanismen und Akkutauschsysteme wurden erstellt. Der Flightcontroller, die Motoren und verschiedene Sensoren wurden für die Drohne ausgewählt.

Drohne
Im August wurde ein erster Prototyp der Drohne zusammengebaut und auf Flugfähigkeit getestet. Die Drohne hat ein 7 Zoll Frame, 4 x Brushless DC Motoren mit 1300KV, einen MicroAir H743 V2 Flight Controller und einen MicroAir 55A AM32 ESC. Zusätzlich ist ein Raspberry Pi Zero 2 W auf der Drohne installiert, um die Kommunikation zur Bodenstation zu übernehmen. Als Akku wird ein 6S Lithium-Ionen-Akku verwendet.
Automatisierter Flug
Im Oktober fand der erste vollautonome Testflug mit Landung statt. Die Positionserkennung der Drohne erfolgt über ein RTK-GPS Modul. Des Weiteren wurden auf der Drohne noch eine DJI AirUnit O4 installiert. Für den automatisierten Flug wurde die Software Ardupilot verwendet.
Animation für den Tag der offenen Tür
Für den Tag der offenen Tür am 7. und 8. November 2025 wurde eine Animation des Ablaufs erstellt. Dafür wurde das CAD-Programm Creo verwendet.

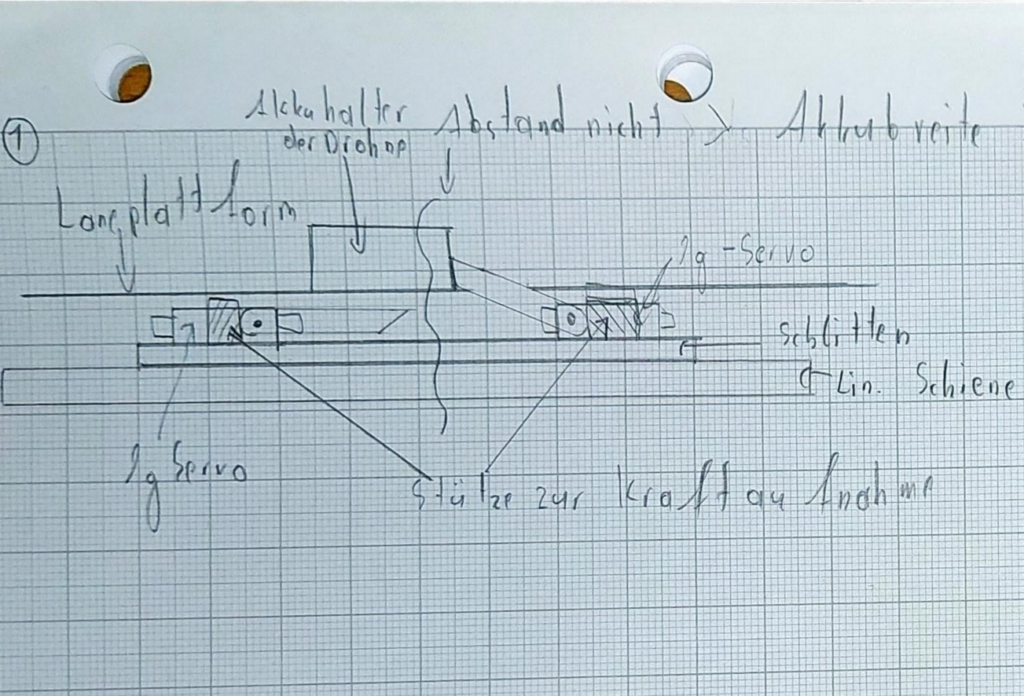
Bodenstation
Im Dezember wurde der erste Prototyp der Bodenstation zusammengebaut. Die Bodenstation besteht aus Aluminiumprofilen. Die Bodenstation hat ein zwei-Achsen Zentriersystem. Die Drohne wird zuerst mittig zentriert und anschließend zum Akkutausch nach oben geschoben.
Bodenstation Systemtest
Beim Tag der offenen Tür am 23.Jänner 2026 wurde der erste vollständige Systemtest der Bodenstation durchgeführt. Dabei wurde die Drohne zentriert, der Akku rausgeschoben, der Slot gewechselt und ein neuer Akku eingeschoben.